Rosie
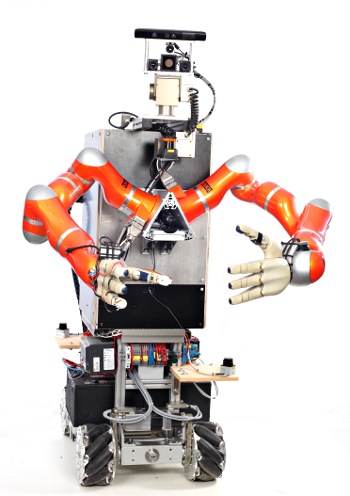 Rosie was our omnidirectional robot platform while our group was at TU-Munich.
We are building a new improved version of the robot, and we are calling it Boxy.
Rosie was our omnidirectional robot platform while our group was at TU-Munich.
We are building a new improved version of the robot, and we are calling it Boxy.
More information here: Boxy
Rosie was our omnidirectional robot platform while our group was at TU-Munich.
We are building a new improved version of the robot, and we are calling it Boxy.
More information here: Boxy